Dear customers,
Yesterday we used the Jointmaster box joint jig to create a zipper like finger joint. The finger joint was very tight so we had to hammer it together.
We also investigated the maximum mass that can be reliably moved with the current stepper motor that is used in the Jointmaster box joint jig. We estimate this around 15 kg. You can use a more powerful step motor to shift more mass.
Our experience is that when mass is more than 15 kg it is better to hold the work piece and move the tool. This will be post for the very near future when we start-up the 3 axis box-joint machine again.
You can read the “Jointmaster solution” and the “step motor introduction” post to fully understand the video’s below.
If you would like to do this yourself, take a look in the Jointmaster shop.
Or stop wasting time and start building your Jointmaster now!
In the video is also shown how to extend the Jointmaster box joint jig range. The table is finger jointed over 55 cm while the Jointmaster box joint jig is range is 43 cm. Maximum length we finger jointed in the past is complete plate length 245 cm (using a moving tool with workpiece fixed).
Now did we only have sunshine yesterday ? We had a strange imperfection in the second run (moment of creation in second part of the video at 7′ 47”) shown below:

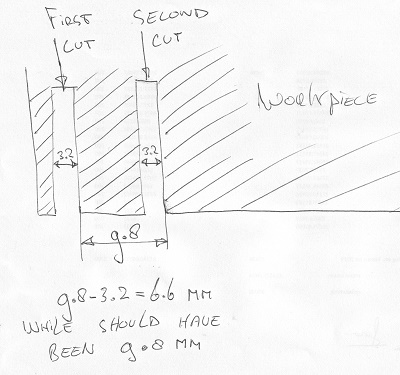
Now one has to miss a lot of step motor steps to cause such imperfection. The imperfection was around 3 mm (5000 steps to cross 5 mm, so this is around 3000 steps.) Thus we did not suspect the step motor. Then we reviewed our settings (part 2 at 5’52”).
Bingo, see picture below. Our “start position” should have included the sawing blade width. Thus if you start with pin in a second run, start position should be pin width + saw width. Thus “start position” 9.8 + 3.2 = 13 mm gives a pin of 9.8 mm. We were lucky to have all on video, otherwise you start thinking of backlash etc.
 The video below shows the sanding process + final product:
The video below shows the sanding process + final product: