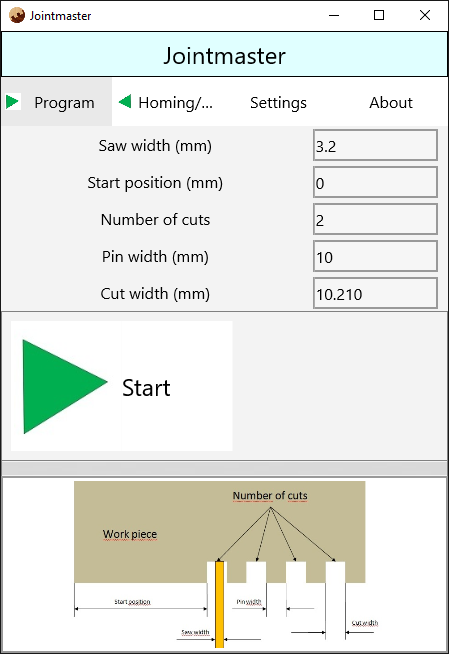
When program starts the screen below is shown. After filling in the parameters. Press the start button and sound is generated on the stereo jack interface. You can listen to the sound using your audio headset. Note, most Android phones play both stereo channels on one speaker. Because both channels are in opposite phase, the sound cancels out. Thus you have to listen using a stereo audio (head)set.
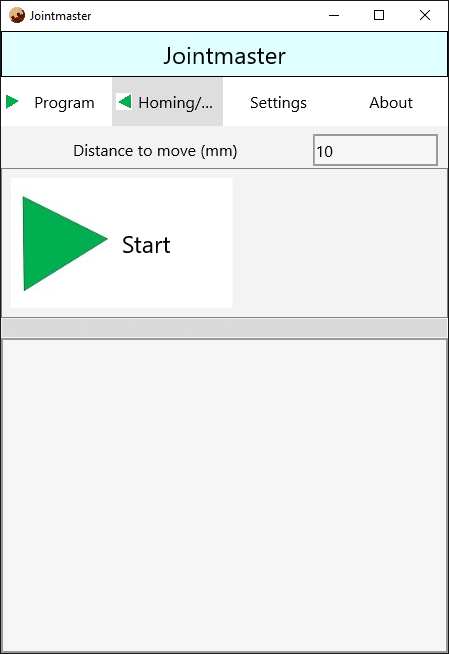
 Homing tab is used to return to start position or to make movements that are not part of a box joint sequence of movements.
Homing tab is used to return to start position or to make movements that are not part of a box joint sequence of movements.
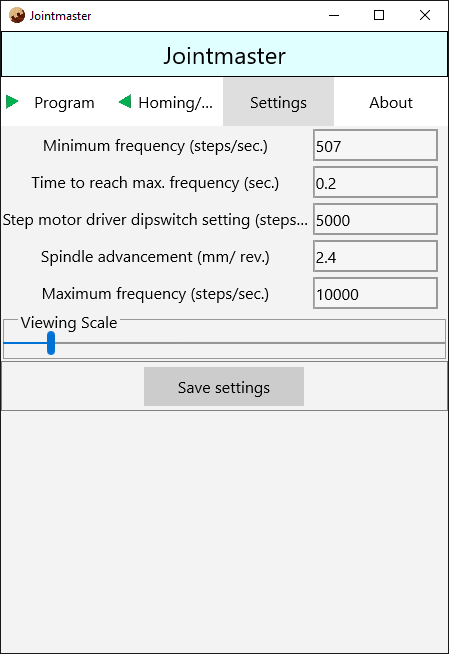
 Settings tab is used to specify settings that are the same for all box joint programs. A step motor cannot start at full speed because it will slip. For this reason it makes a frequency sweep from the “minimum frequency” to the “maximum frequency” within “Time to reach max. frequency” seconds. The minimum frequency may not be less than 50 Hz. because below 50 Hz the amplification to TTL level is not reliable. The maximum frequency may not be more than 15.000 Hz. for the same reason. The “spindle advancement” is the trapezium nut translation in milli meters when the trapezium spindle makes one revolution. On every step motor driver there are dip switches to set the number of steps to make for one revolution. This dipswitch setting has to correspond to the value in “Step motor driver dipswitch setting.” 5000 is the standard setting we use. These settings are used internally to calculate the number of sound waves in a .wav file. You will notice that when you enter a new program, the first run will take a bit longer because these .wav files have to be recalculated. If you do not change settings, the .wav files are used again.
Settings tab is used to specify settings that are the same for all box joint programs. A step motor cannot start at full speed because it will slip. For this reason it makes a frequency sweep from the “minimum frequency” to the “maximum frequency” within “Time to reach max. frequency” seconds. The minimum frequency may not be less than 50 Hz. because below 50 Hz the amplification to TTL level is not reliable. The maximum frequency may not be more than 15.000 Hz. for the same reason. The “spindle advancement” is the trapezium nut translation in milli meters when the trapezium spindle makes one revolution. On every step motor driver there are dip switches to set the number of steps to make for one revolution. This dipswitch setting has to correspond to the value in “Step motor driver dipswitch setting.” 5000 is the standard setting we use. These settings are used internally to calculate the number of sound waves in a .wav file. You will notice that when you enter a new program, the first run will take a bit longer because these .wav files have to be recalculated. If you do not change settings, the .wav files are used again.